方案价值

Projektanforderungen
Technische Lösung
AGV-Auswahl


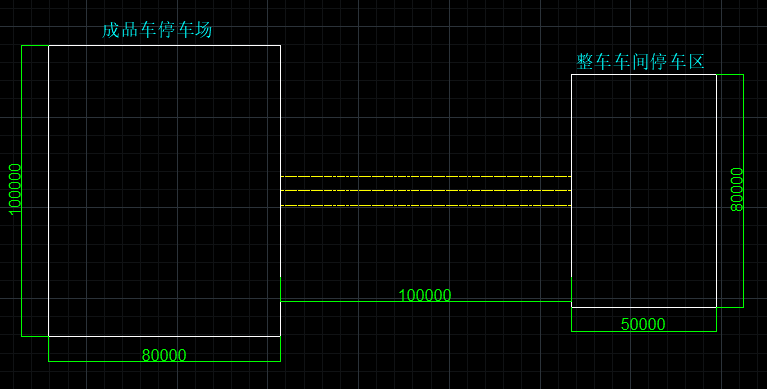
1. Gebäudelayout und Stationsverteilung
Transport von Fertigfahrzeugen vom Montagebereich zum Fertiglager;
Berücksichtigung externer Fußgänger- und Fahrzeugeingriffe erforderlich.
2. Fahrzeuginformationen:
Umfasst folgende Modelle: (hauptsächlich Standard-PKW oderSUV)
Modell 1: ca. L4640xB1780xH1435mm; Radstand: ca. 2700mm; Gewicht: ca. 1330~1400 kg;
Modell 2: ca.L4885xB1840xH1445mm; Radstand: ca.2825mm; Gewicht: ca.1530~1600kg;
Modell 3: ca. L4390x B1795xH1565mm; Radstand: ca. 2640mm; Gewicht: ca.1400~1500 kg
Außenbereich Straßenkanalbreite:10000mm
Systemarchitektur

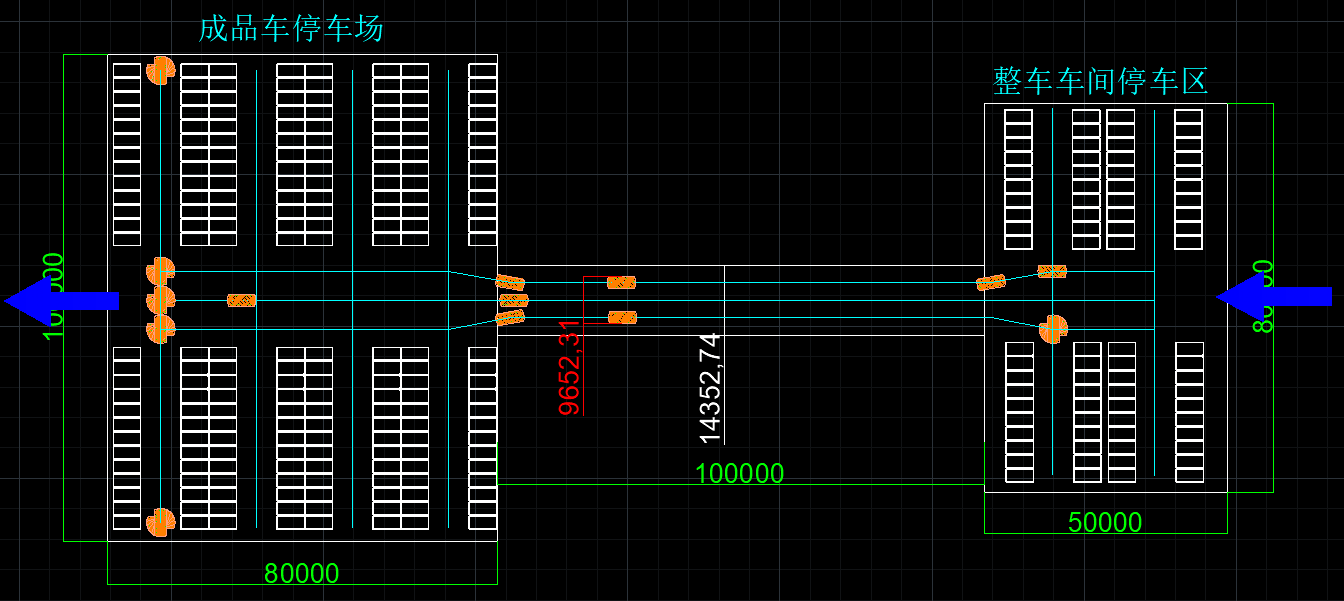
1. Die beiden Parkbereiche sind durch eine zentrale AGV-Hauptachse in obere und untere Zonen unterteilt. Manuelles Parken und AGV-Auslagerung erfolgen zeitlich versetzt in verschiedenen Zonen, um Überschneidungen zu vermeiden.
2. Die Hauptachse hat drei Fahrspuren: Die mittlere ist für leere AGVs vom Fertiglager zur Montagezone, die anderen beiden für beladene AGVs in entgegengesetzter Richtung. Bei manuellen Arbeiten in einer Zone wird die entsprechende Spur deaktiviert, nur zwei Hauptspuren bleiben aktiv.
3. Fertiglager: 208 Stellplätze, Montagebereich: 80 Stellplätze, tatsächliche Kapazität kann durch AGV-Ladestationen beeinflusst werden.
Verkehrsmanagement
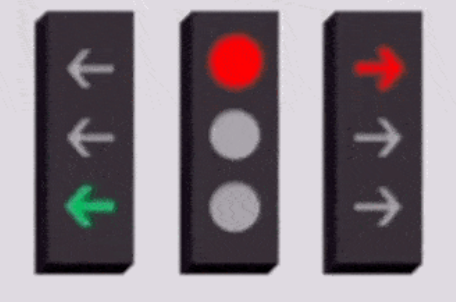
Ampeln und Kameras in Außenbereichen: Kameras erkennen Personen und Fahrzeuge, Ampeln signalisieren Fahrzeugen (Rot=Stopp, Grün=Fahren).
Kreuzungslogik:
(1) Standardmäßig Rot, bei Fahrzeugankunft erfasst Kamera das Fahrzeug, System aktiviert Kontrollzone;
(2) AGVs in Warteposition werden gestoppt, AGVs in Kontrollzone werden beschleunigt;
(3) Bei leerer Kontrollzone schaltet Ampel auf Grün, Fahrzeug passiert;
(4) Nach Fahrzeugdurchfahrt wird Kontrollzone freigegeben, AGVs können einfahren.
2. Weitere Kreuzungen haben Ampeln/Kameras zur Erkennung von Personen/Fahrzeugen.
Kreuzungslogik:
(1) Wie oben beschrieben
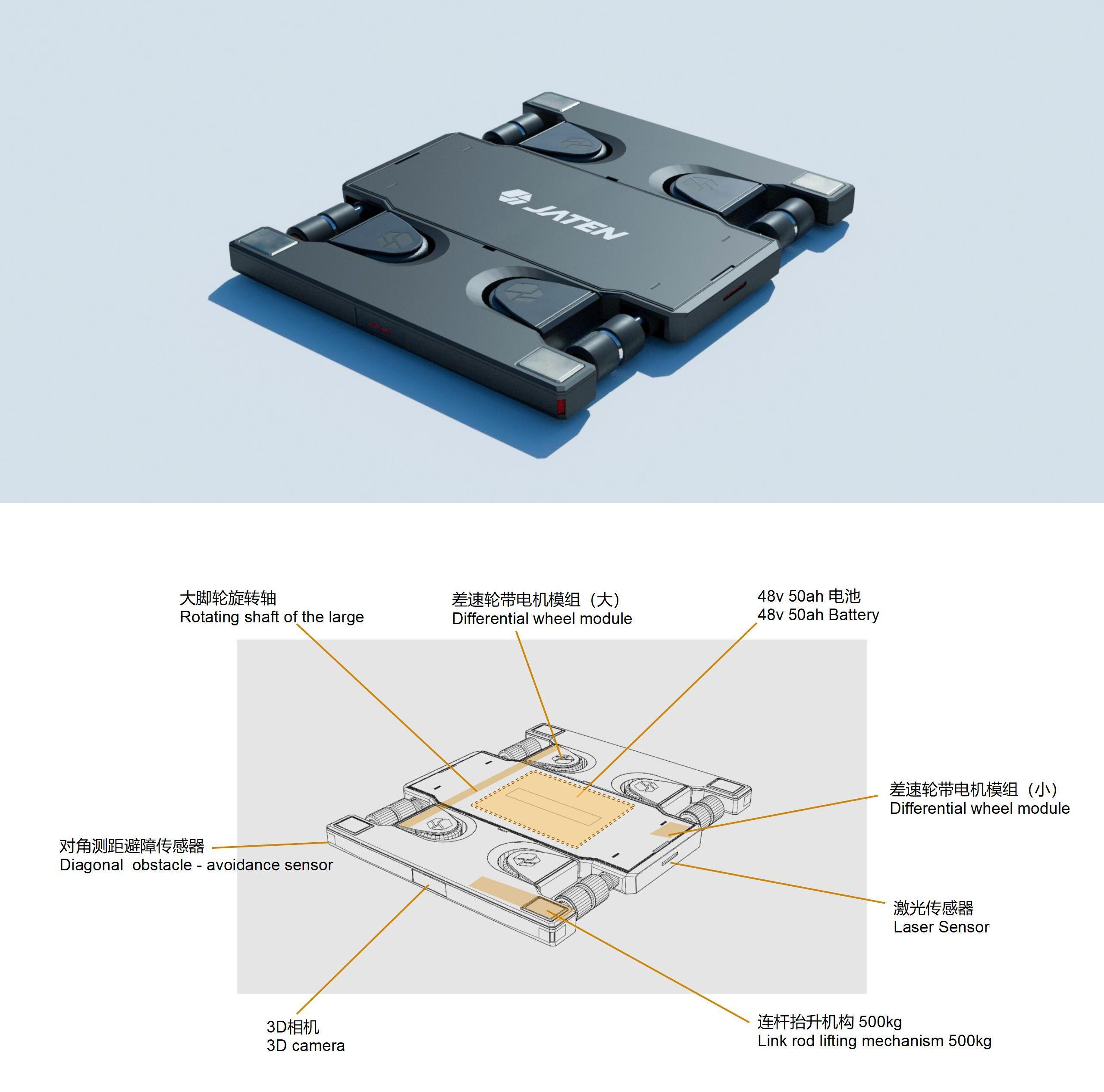
Anpassbare Greifvorrichtungen für verschiedene Radstände, Radgreifer ersetzen Wagenheberkontaktflächen, greifen alle vier Räder.