方案价值

Resumen de la solución
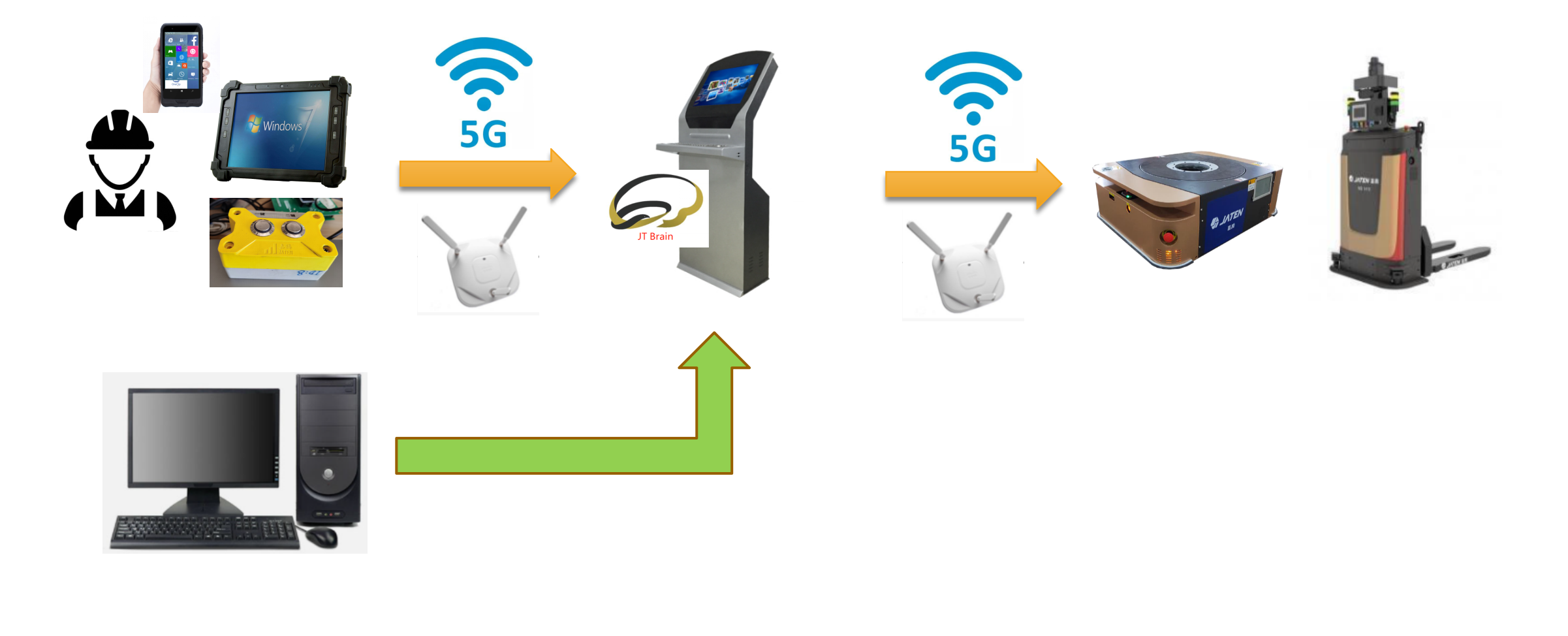
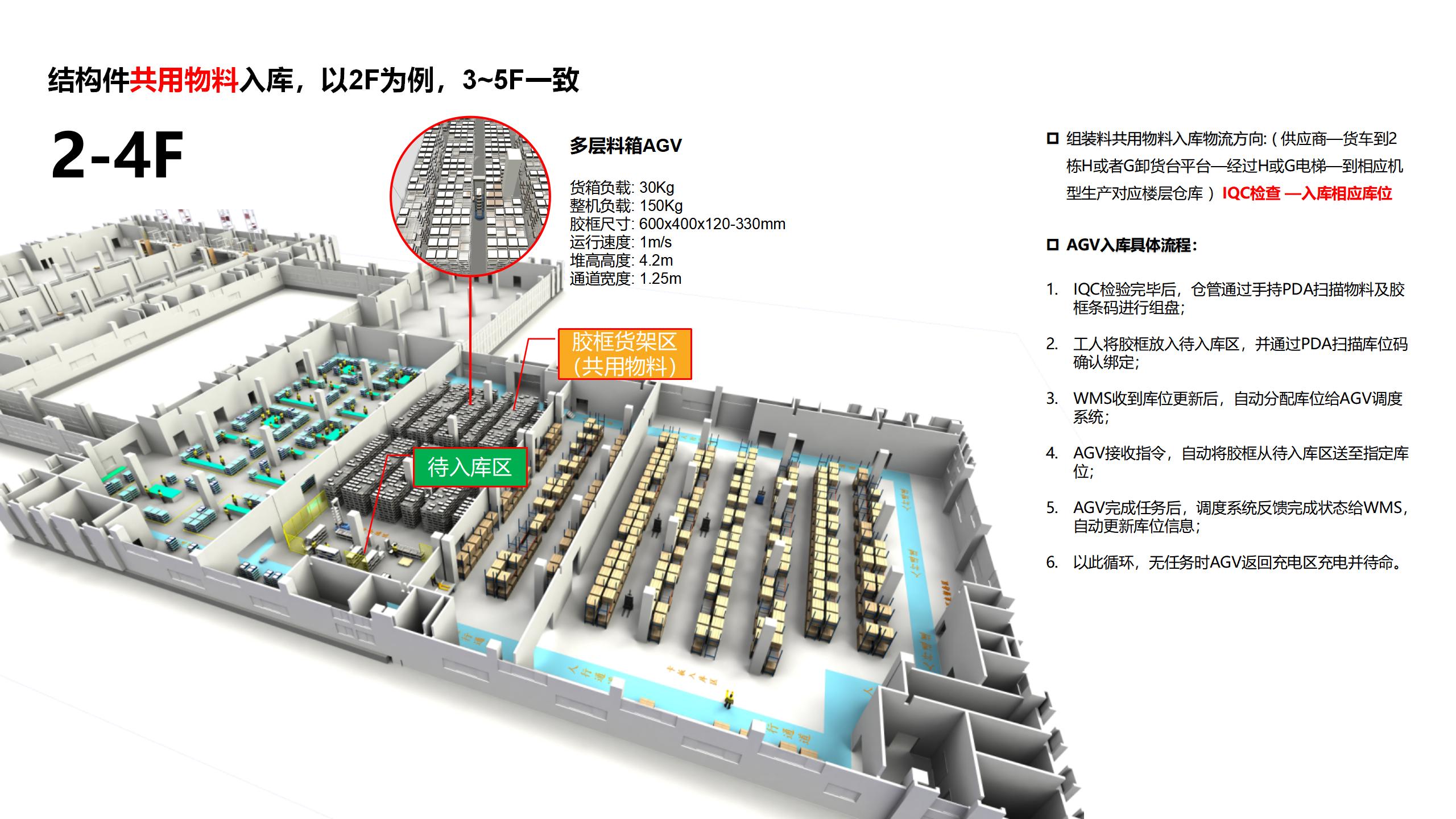
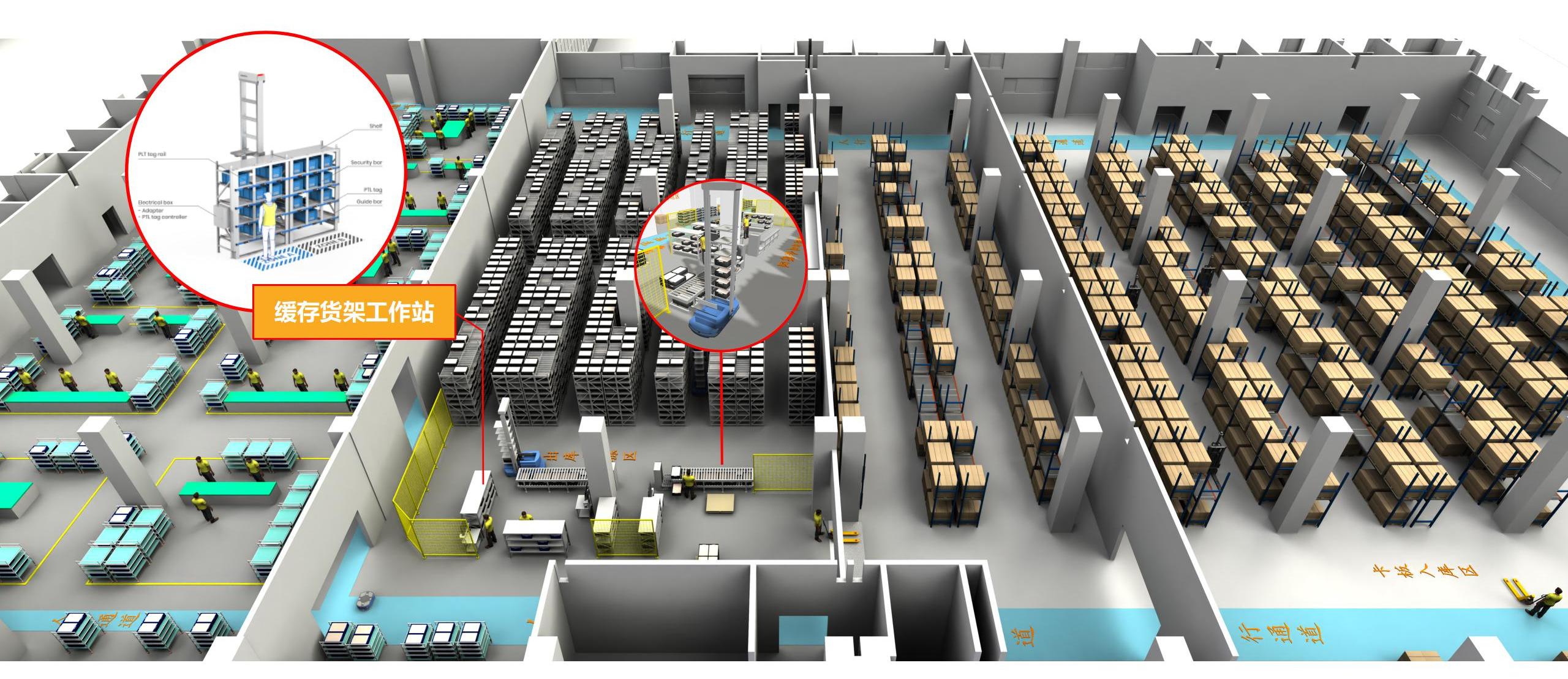
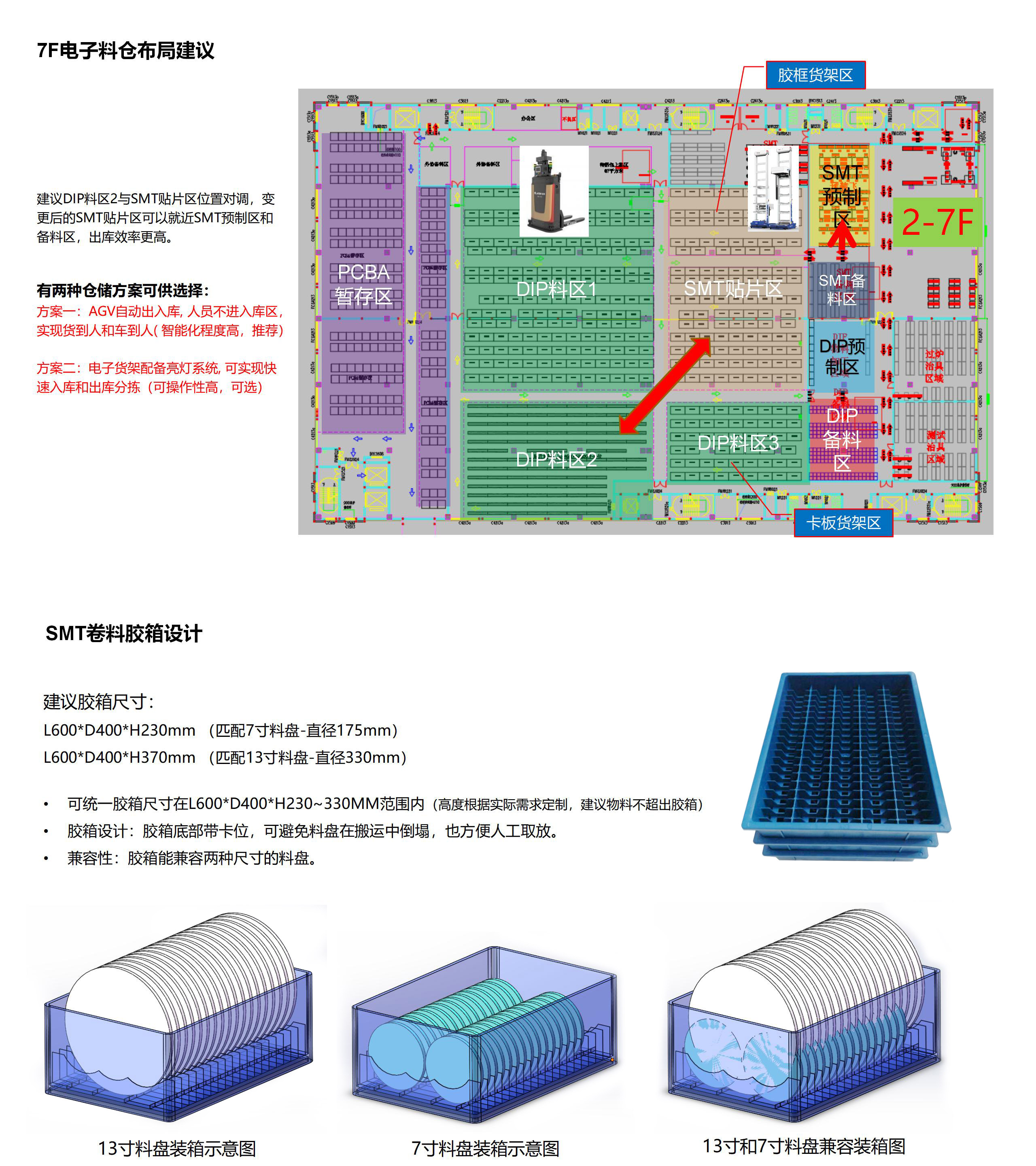
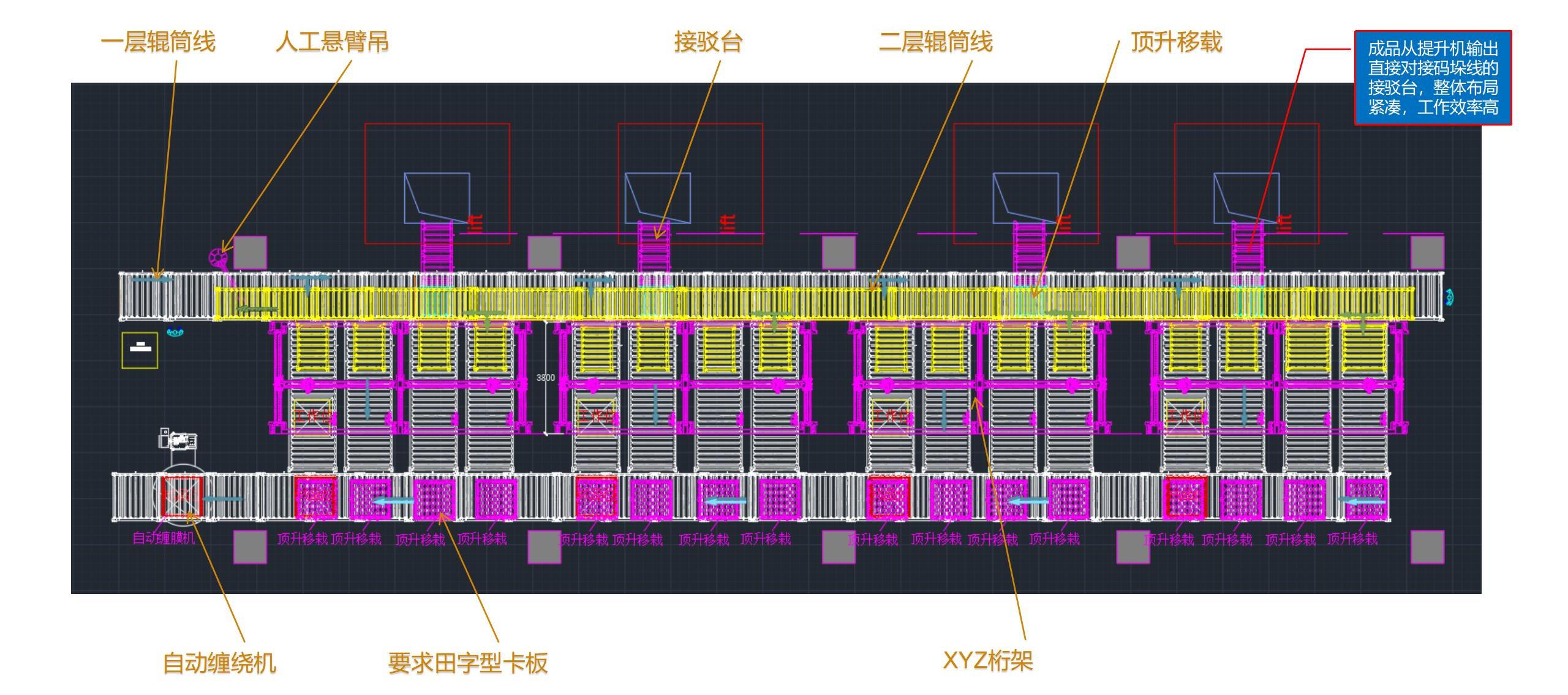
Diseño de distribución y arquitectura del sistema, planificación de rutas, flujo de trabajo, diseño de estaciones
Selección de AGV y número de cargadores/accesorios